Paper: High Confidence Generalization for Reinforcement Learning
By
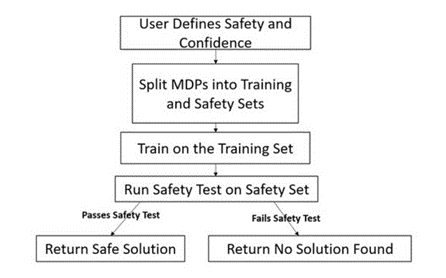
We present several classes of reinforcement learning algorithms that safely generalize to Markov decision processes (MDPs) not seen during training. Specifically, we study the setting in which some set of MDPs is accessible for training. For various definitions of safety, our algorithms give probabilistic guarantees that agents can safely generalize to MDPs that are sampled from the same distribution but are not necessarily in the training set. These algorithms are a type of Seldonian algorithm (Thomas et al., 2019), which is a class of machine learning algorithms that return models with probabilistic safety guarantees for user-specified definitions of safety.