Hardware

Mini-Cheetah-Vision
Mini-Cheetah-Vision is a high-performance quadruped robot that can run, jump, and backflip. This new version of Mini-Cheetah robot has a vision sensing system including cameras and an NVIDIA computer

Point-foot Biped
Point-foot biped is our custom legged robot designed to study data-driven dynamic locomotion controllers.

Mini-Cheetah-Plus (coming soon)
Mini-Cheetah-Plus is a mid-scale high-performance quadruped robot that is as dynamic as Mini-Cheetah, but equips more computation power and extensive sensing systems.

Humanoid (coming soon)
Humanoid robot is a small-scale dynamic biped system with two simple arms. The actuators and the robot design are based on the technologies used in Cheetah robots, which have accomplished extremely dynamic motion.

Treadmill
We use a strong and powerful treadmill to perform dynamic motion tests.
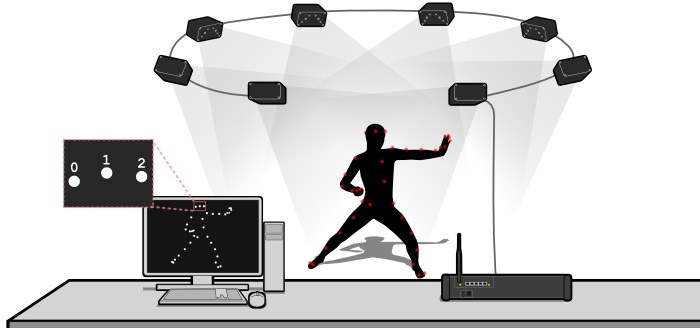
Motion Capture System
To obtain the exact position and orientation of robot, we use motion capture system. The verified estimators by motion capture data are used at outdoor tests.

CNC
CNC machine enable not only robot hardware maintenance but also manufacturing our custom robotic systems

Machine Shop
Small but potent machine shop is in the lab