Research
Control Architecture for Dynamic Motion
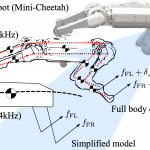
To fully exploit the hardware capability of legged systems, we need a controller that can address the challenging issues related to dynamic locomotion, such as body control during short stance periods, aerial phases, and high speed swing leg motion control.
Perception Systems for Dynamic Movement
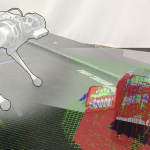
To do more than blind walking, the robots must understand the environment, control the motion based on the information, and respond to the external changes. We advance the perception systems for dynamic mobile robots by exploring new sensors, developing the new perception systems, and formulating new estimation algorithms.
Advanced Athletic Intelligence
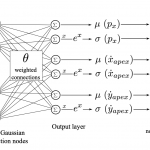
Locomotion and dynamic maneuver are complex motion, but the current robotic systems are not comparable to animal or human-level motion control capability. We advance the 'Athletic Intelligence' of robotic systems to accomplish dynamic, robust, and versatile motion control capability by utilizing machine learning techniques, trajectory optimization, and nonlinear control.